This was undergraduate thesis work in mechanical engineering, completed in 2002.
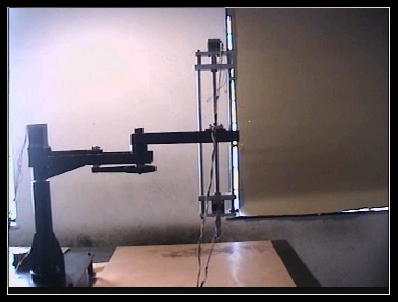
A SCARA robot arm was developed from first principles. Continuous path control was achieved by outfitting the motion controller from the LinuxCNC project (then known as EMC2) with the robot’s forward and inverse kinematics. The robot was programmable via G-code (RS-274D) and retained by the mechanical engineering department as an aid for teaching Numerical Control programming.